
To make the most of the amazing work done by the guys at OpenROV, I decided to upgrade my ROV to include a few things to make it work better.
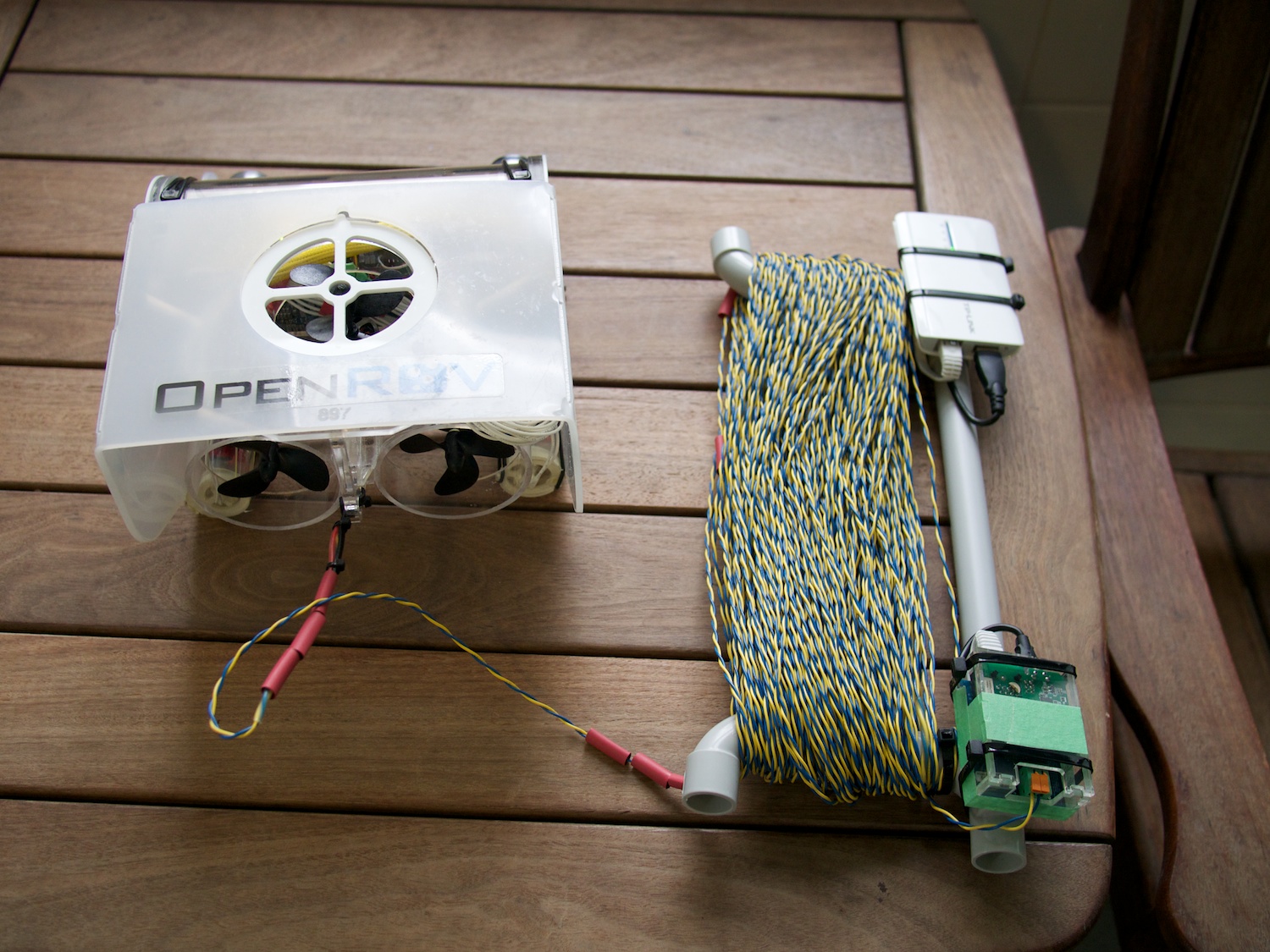
First things first, the tether, it has to be managed. I used this great idea using parts found locally. I took this a step further.
TP-Link battery operated router, this gives me a wireless link between my tether and my laptop. I have noticed some hick ups in the connection once in a while. I'm not sure if this is because of the WiFi or the ROV CPU. More investigations needed.
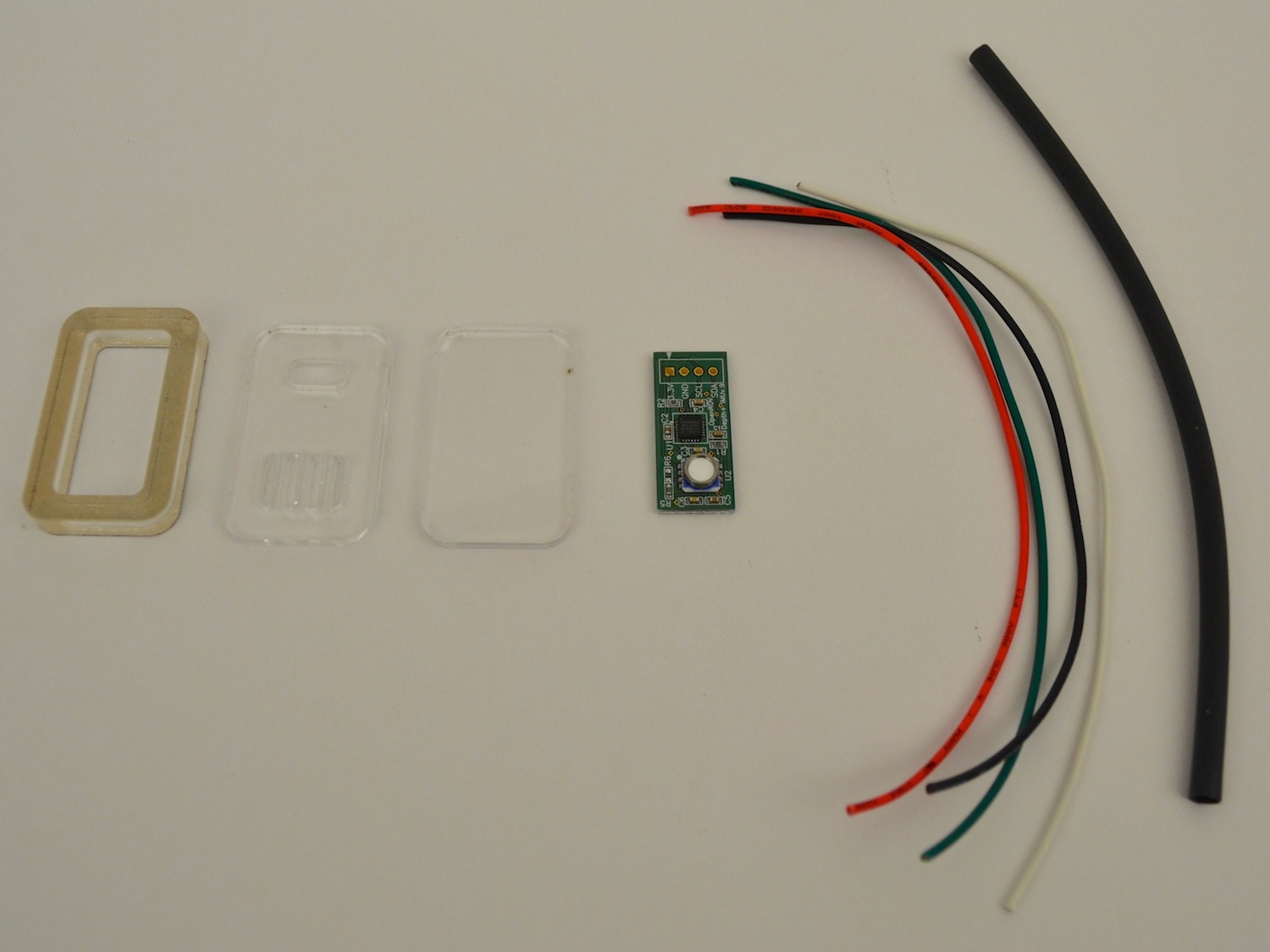
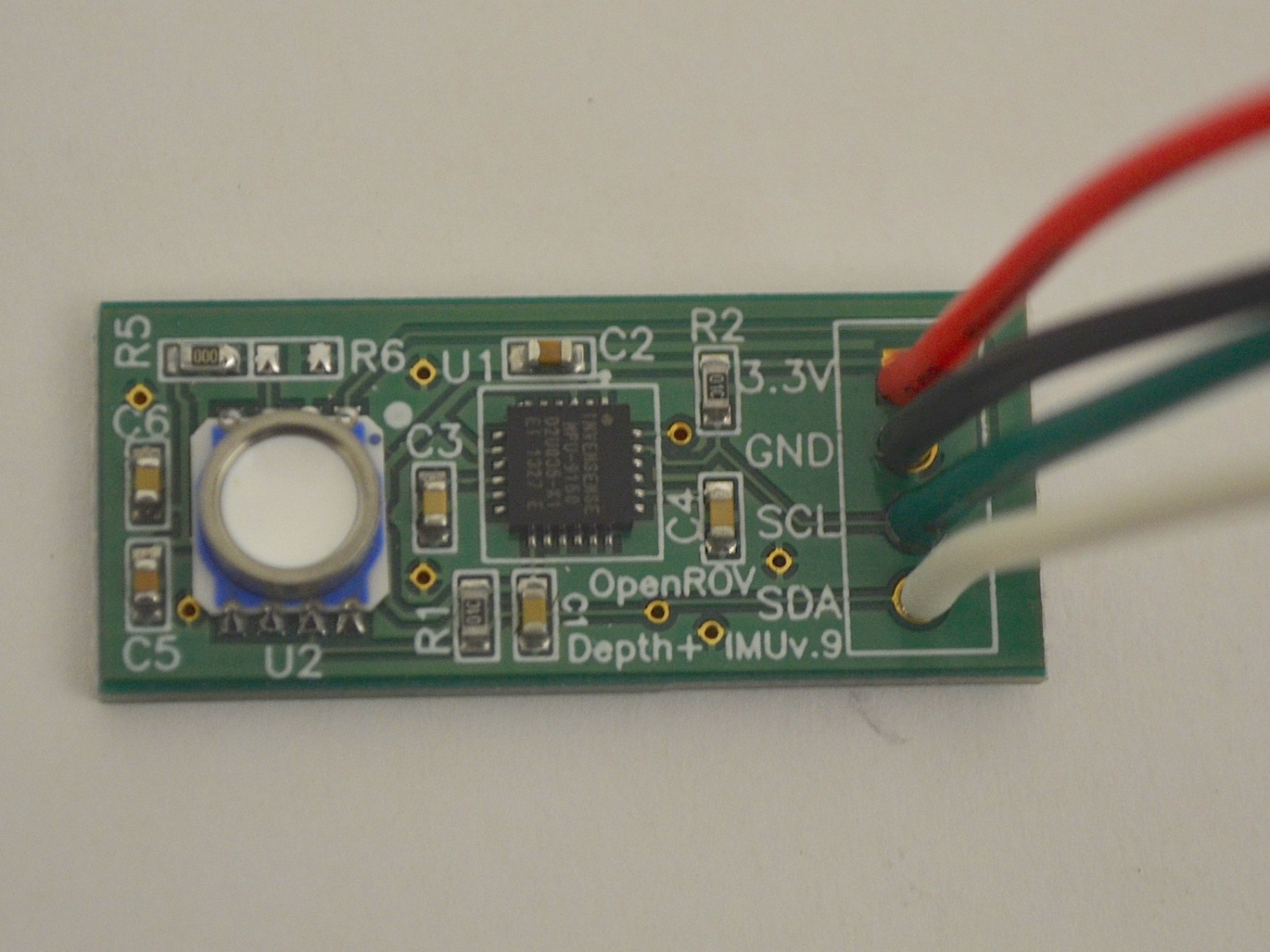
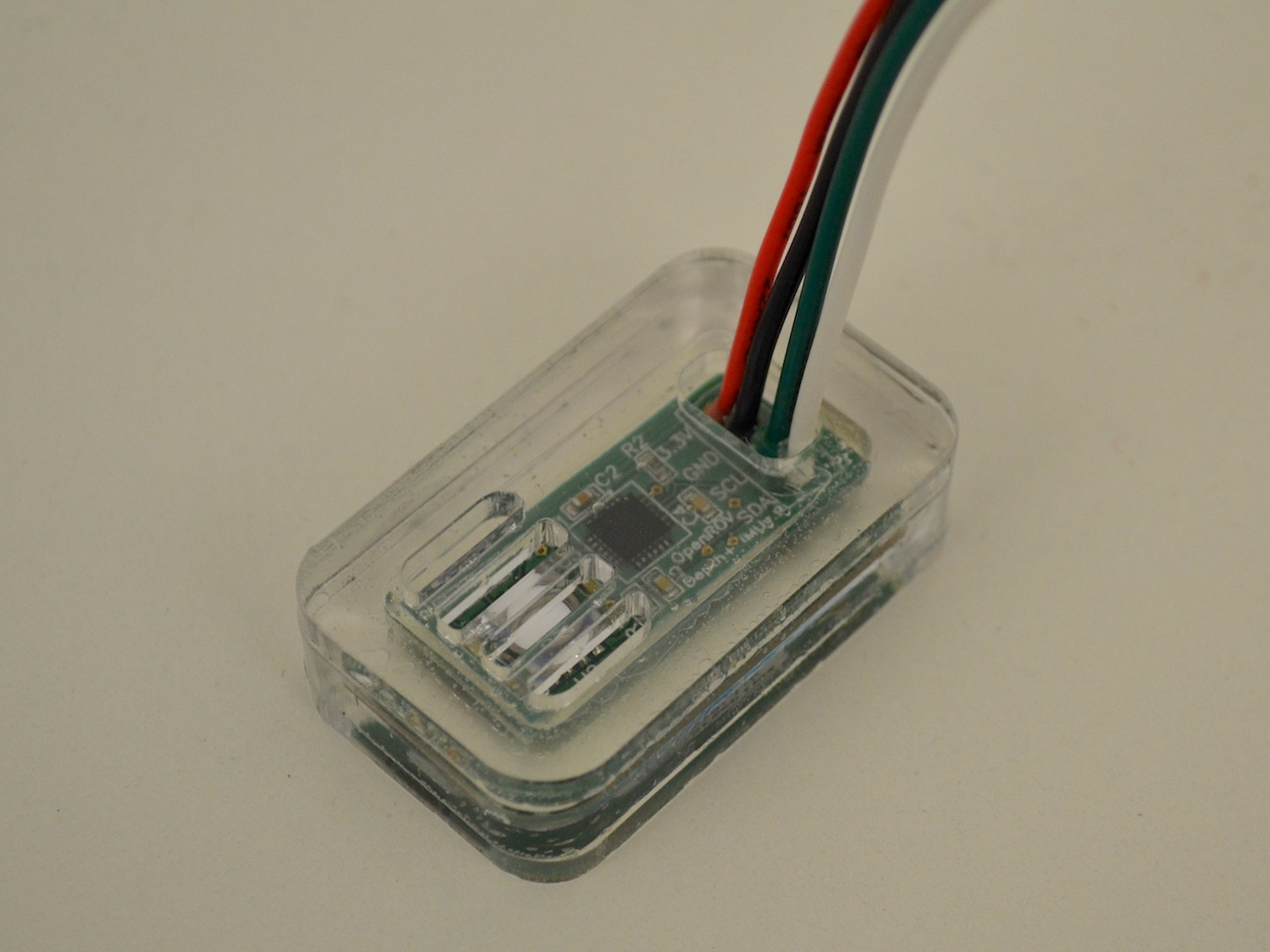
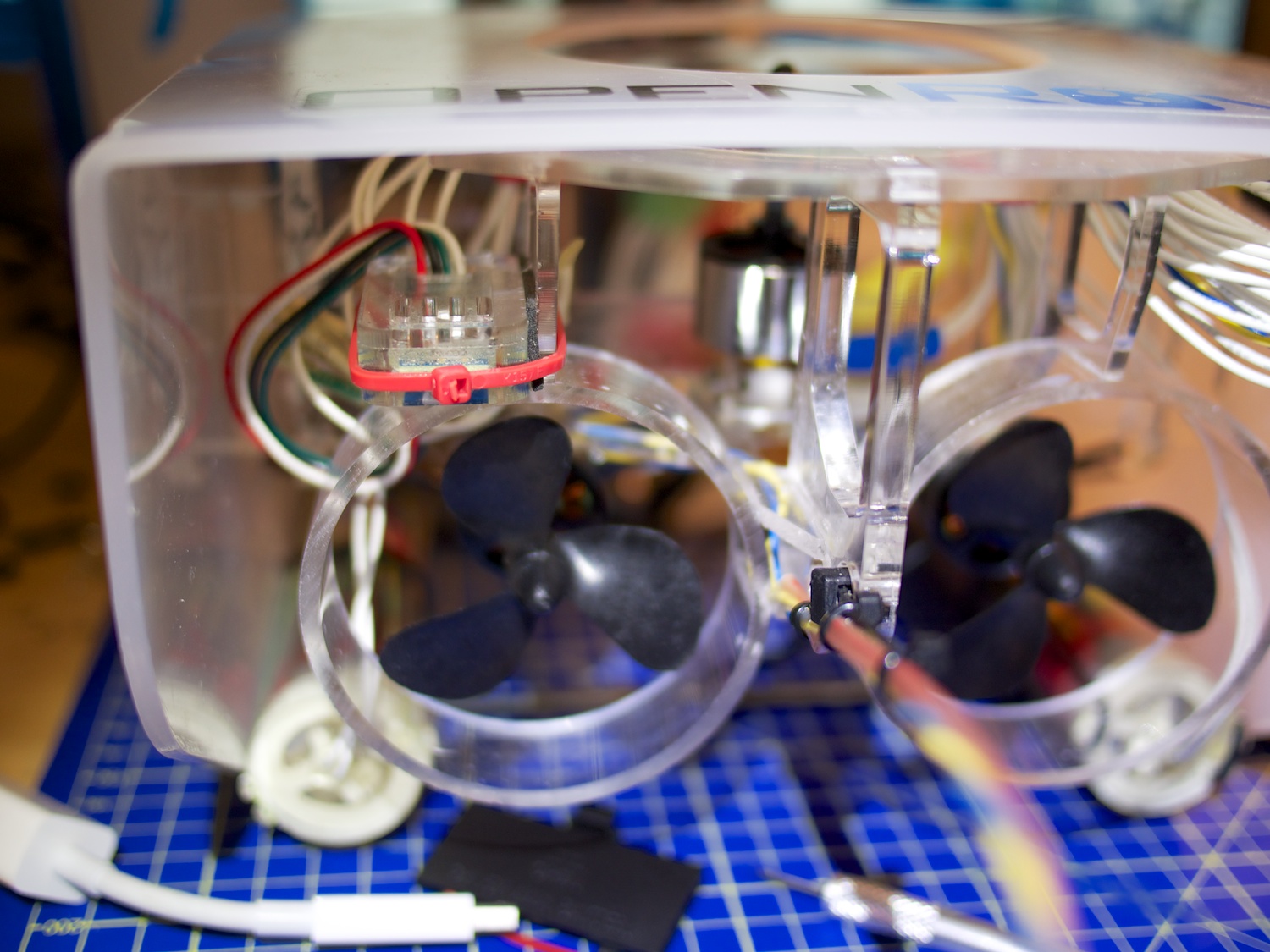
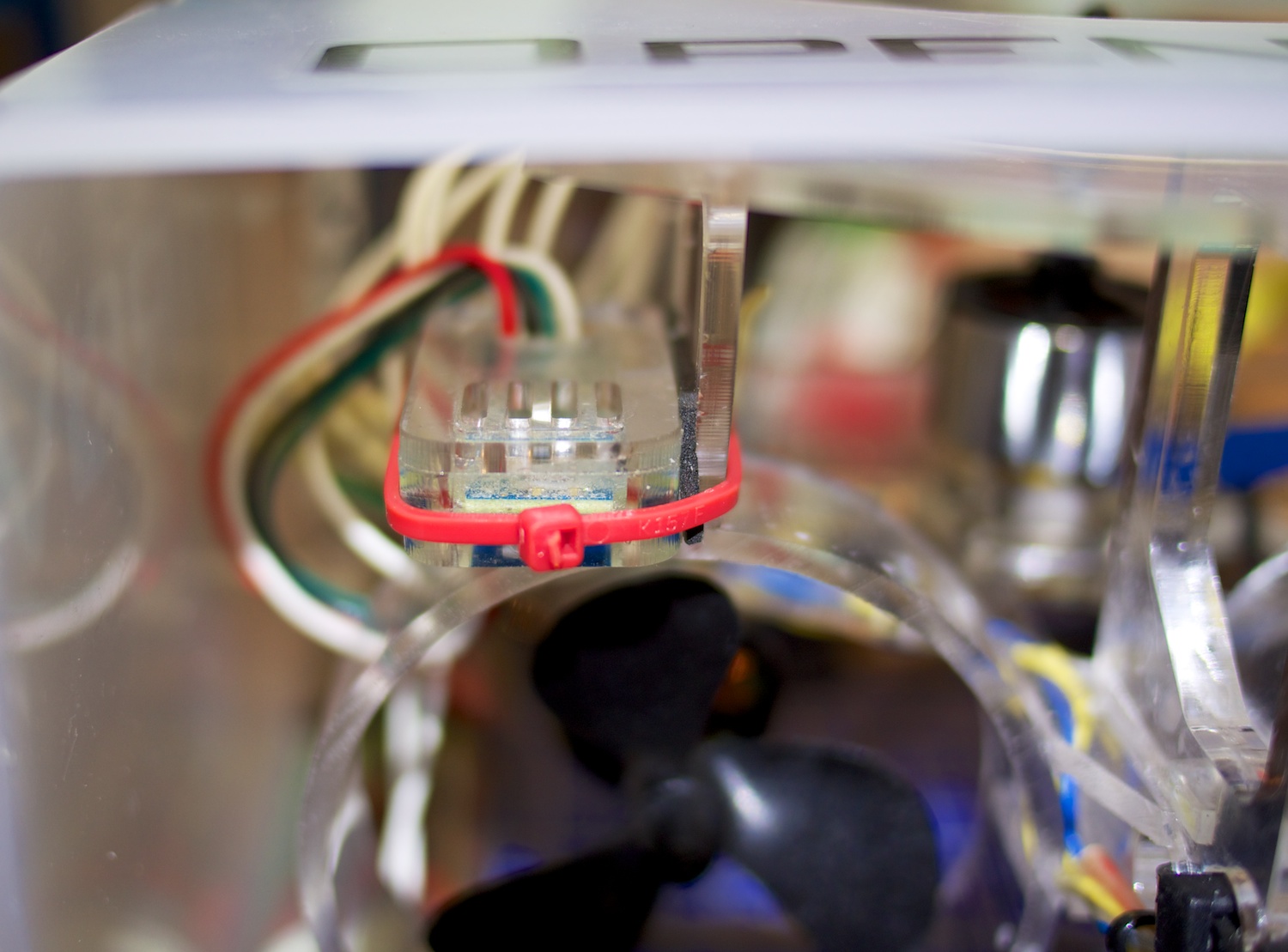
IMU (Inertial Measurement Unit). Installing it was pretty easy, just follow the instructions here. This adds a whole lot of great info to the OpenROV cockpit. A fantastic addition especially if exploring beyond visual range. What wasn't included in the instructions for this was how to mount it to your ROV, so I've added some pictures to show how I've installed it.