

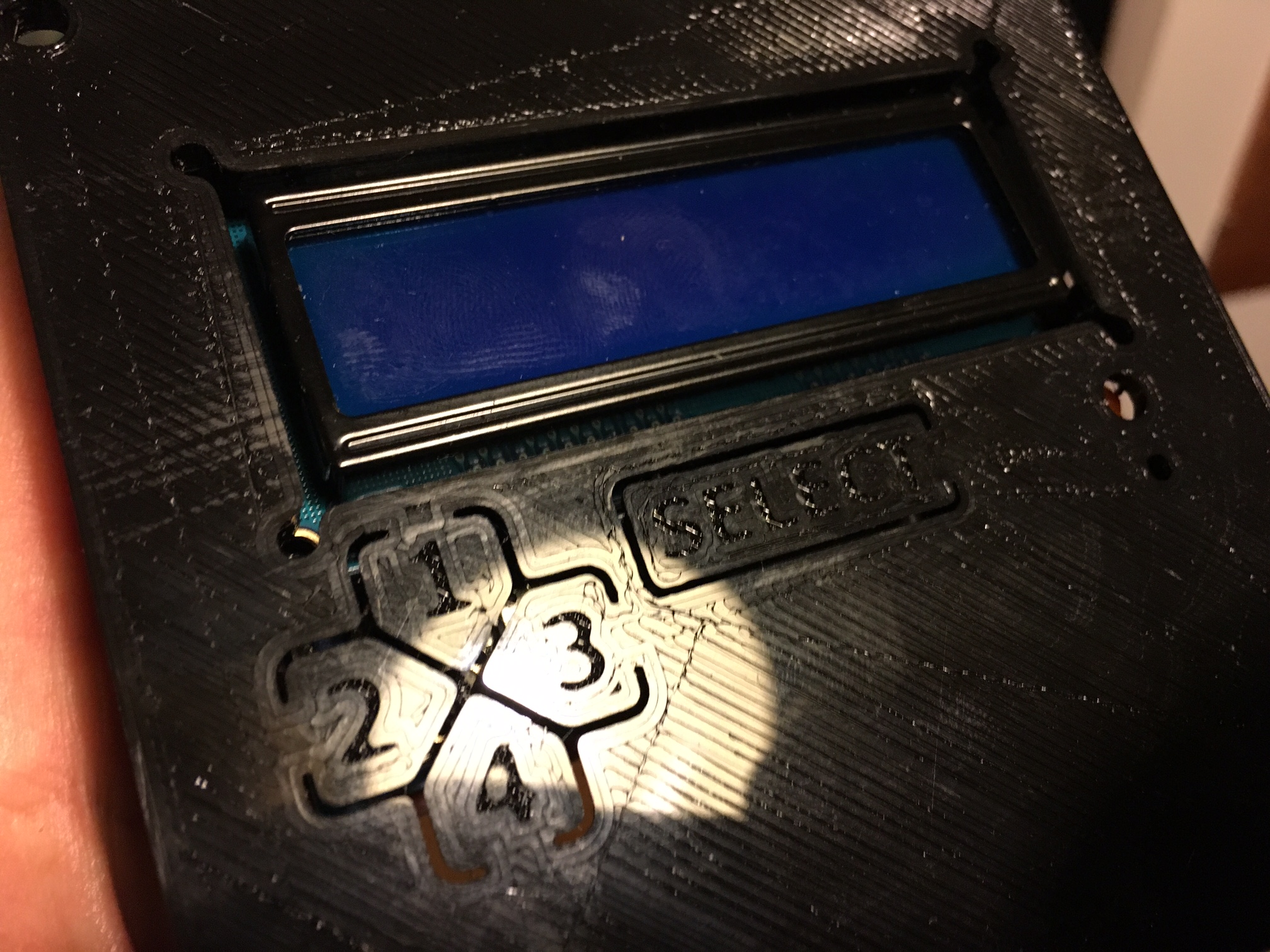
The BoxFishOven controller supports multiple reflow, annealing, curing and drying profiles selectable from the LCD display and a design that makes it easy to add new profiles.
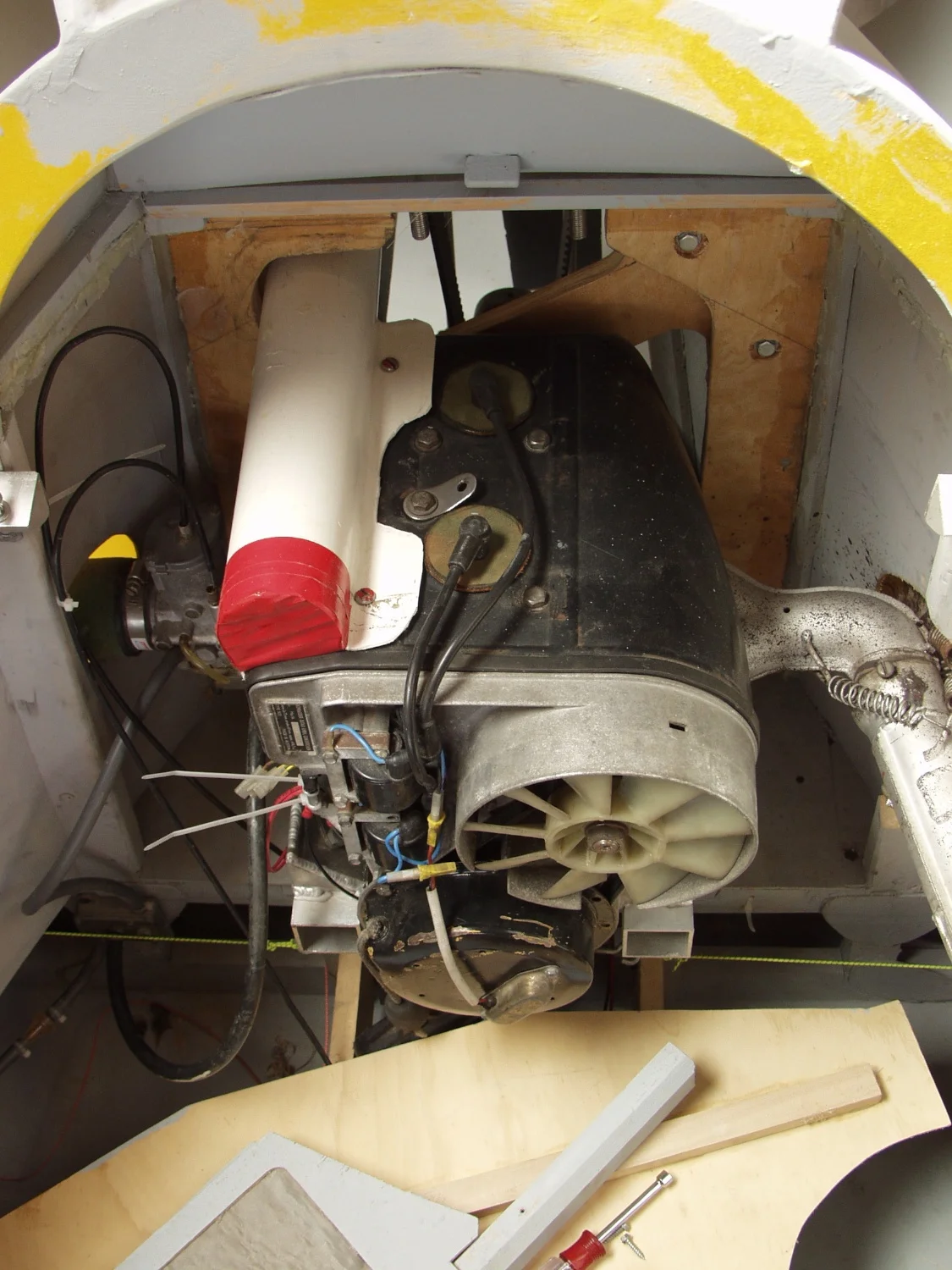
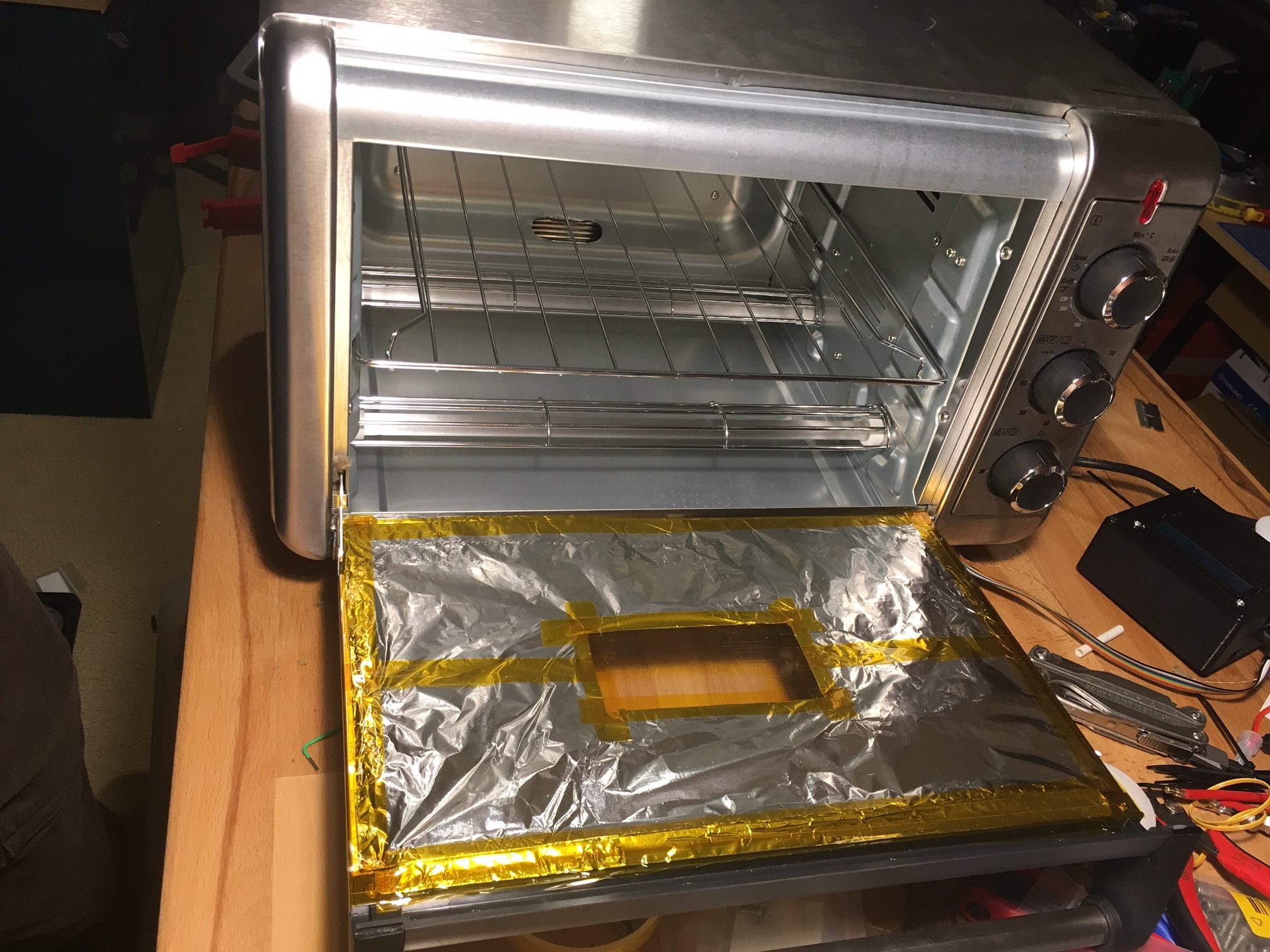
The target oven has two SSRs controlling the top and bottom elements (although we only turn them on/off together), a relay to control the oven's convection fan, and a PWM controlled blower that forces room air into the oven to cool it down rapidly.
Built to run on an Arduino Uno or similar with the Adafruit LCD shield and a MAX31855 thermocouple board, plus transistor/mosfet drivers for all the relays.
A built-in simulator allows the program to be tested and evaluted without any special hardware (thermocouple or relays or an oven).
All files available here: https://github.com/Orange-Cat/BoxFishOven
Links:
- LCD button faceplate for 3D printing ( http://www.thingiverse.com/thing:109589 )
Required Libraries:
- Adafruit RGB LCD Shield Library ( https://github.com/adafruit/Adafruit-RGB-LCD-Shield-Library )
- Arduino PID Library ( https://github.com/br3ttb/Arduino-PID-Library )
- MAX31855 Library for reading the thermocouple temperature ( https://github.com/rocketscream/MAX31855 )
- MenuBackend 1.6 ( https://github.com/Orange-Cat/MenuBackend )
Included libraries:
- BoxFishUI (a simple menu driven interface to a 2 line LCD display that uses MenuBackend)
- PIDSeq (a simple PID operations sequencer that uses the Arduino PID Library)
PID Tuning:
License:
- This firmware is released under the Creative Commons Attribution-ShareAlike 4.0
- International license.
- * http://creativecommons.org/licenses/by-sa/4.0/